Diferencia entre revisiones de «Brazo»
(→Diseño de la mecánica) |
(→Diseño de la mecánica) |
||
| Línea 125: | Línea 125: | ||
[[Archivo:pinza.jpg]] | [[Archivo:pinza.jpg]] | ||
| + | |||
| + | |||
| + | '''Estructura''' | ||
| + | |||
| + | La grúa consistirá en 2 partes; Una torre (o mástil) donde se encontrará un motor para enrollar/desenrollar la cuerda de la que colgará la pinza. Y un brazo (a modo de pluma) unido a éste, en cuyo extremo irá añadida una roldana, que girará libremente, sobre la cual pasará la cuerda que sostendrá a la pinza. | ||
| + | |||
| + | [[Archivo:Estructura.jpg]] | ||
| + | |||
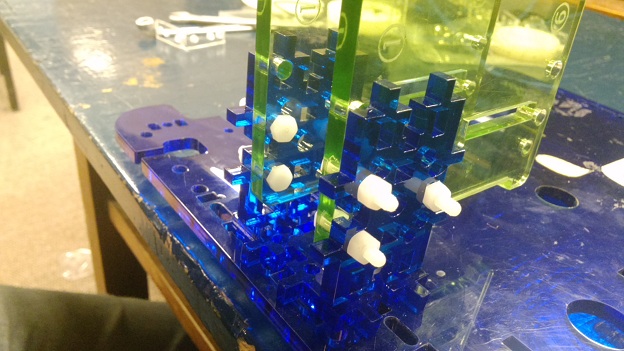
| + | '''Materiales''' | ||
| + | |||
| + | Como en el laboratorio de robótica hay muchas “sobras” y recortes de acrilico de viejos robots Butiá, éstos se utilizarán para la construcción de la torre y el brazo. | ||
| + | La pinza se cortará en acrílico de 6mm. | ||
| + | Además se utilizaran tornillos, tuercas y fichas de ensamblaje pertenecientes al kit butiá. | ||
| + | |||
| + | Esta decisión tiene como ventaja que la grúa quedará mejor integrada a la plataforma butiá, además de que las piezas utilizadas son casi enteramente del kit butiá (el brazo utiliza dos barandas ligeramente modificadas para la tarea), por lo que no será necesario fabricar piezas personalizadas, a excepción de la pinza. | ||
| + | |||
| + | [[Archivo:materiales.jpg]] | ||
== ''' Conexión con la placa USB4Butia ''' == | == ''' Conexión con la placa USB4Butia ''' == | ||
Revisión del 16:32 3 jul 2015
Contenido
Integrantes
- Gustavo Di Cesare tavogus88@gmail.com
- Santiago Callejas sancagon87@gmail.com
- Noelia Gonzalez noeggamarra@gmail.com
Tutor
- Rodrigo Dearmas - dearmas@fing.edu.uy.
Introducción
El presente trabajo tiene como objetivo principal el diseño y creación de un brazo robótico de un grado de libertad. Se realizarán adaptaciones al programa TurtleBot para controlar el brazo robótico. Con la idea de hacer un aporte a la comunidad Butiá, se creará la interfaz electrónica para controlar el brazo robot.
Objetivo
Realizar un brazo robótico o pinza de bajo costo que se integre como actuador al kit butiá y se pueda comandar desde una paleta de turtlebots. Construcción, diseño programación.
Motivación
Dada la falta de actuadores disponibles para el robot butiá es deseable contar con un actuador que habilite al mismo a manipular objetos del entorno. Es esta necesidad la que se intentará satisfacer con el diseño de un brazo robótico adaptado al robot butiá. Dado que el proyecto butiá está enfocado a la enseñanza en liceos y escuelas, el brazo debe ser de costo razonablemente bajo, y con materiales de fácil acceso.
Investigación
Robótica, Robots y Arquitectura de los robots
Existen diferentes tipos y clases de robots, entre ellos con forma humana, de animales, de plantas o incluso de elementos arquitectónicos pero todos se diferencian por sus capacidades y se clasifican en 4 formas:
- Androides: robots con forma humana. Imitan el comportamiento del hombre, su utilidad en la actualidad es de solo experimentación. La principal limitante de este modelo es la implementación del equilibrio a la hora del desplazamiento, pues es bípedo.
- Móviles: se desplazan mediante una plataforma rodante (ruedas); estos robots aseguran el transporte de piezas de un punto a otro.
- Zoomórficos: es un sistema de locomoción imitando a los animales. La aplicación de estos robots sirve, sobre todo, para el estudio de volcanes y exploración espacial.
- Poliarticulados: mueven sus extremidades con pocos grados de libertad. Su utilidad es principalmente industrial, para desplazar elementos que requieren cuidados.
Anatomía del brazo.
La anatomía de un brazo robótico se refiere a la construcción física. La mayoría de los Brazos robóticos utilizados en las fábricas actuales están montados sobre una base que está sujeta al suelo. Los brazos robóticos están disponibles en una amplia gama de tamaños, formas y configuraciones físicas. La gran mayoría de los brazos comerciales disponibles en la actualidad tienen una de estas cuatro configuraciones básicas:
- Configuración polar: Usados en la manipulación en máquinas herramientas, soldadura por punto, fundición a presión, máquinas de desbarbado, soldadura por gas y por arco. Es un robot cuyos ejes forman un sistema polar de coordenadas.
- Configuración cilíndrica: Usado para trabajos de “pick and place” (tomar y colocar), aplicación de impermeabilizantes, operaciones de ensamblado, manipulación de máquinas herramientas y soldadura por arco.
- Configuración de coordenadas cartesianas: Usado para trabajos de “pick and place” (tomar y colocar), aplicación de impermeabilizantes, operaciones de ensamblado, manipulación de máquinas herramientas y soldadura por arco.
- Configuración de brazo articulado: Usado para operaciones de ensamblaje, fundición a presión, máquinas de desbarbado, soldadura a gas, soldadura por arco, y pintado en spray. Es un robot cuyo brazo tiene como mínimo tres articulaciones rotatorias.
Motores (Info y Presupuesto)
Los dos tipos de motores más utilizados para la construcción de brazos robóticos son:
SERVOMOTORES
Son motores con capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua.
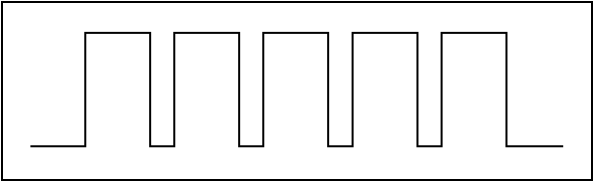
La mayoría trabaja en la frecuencia de los cincuenta hertz, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, éste se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares. A continuación se exponen ejemplos de cada caso:
- Señal de ancho de pulso modulado:
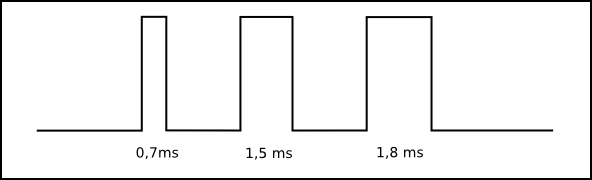

- Motor en sentido horario (ejemplo 0,7 ms):
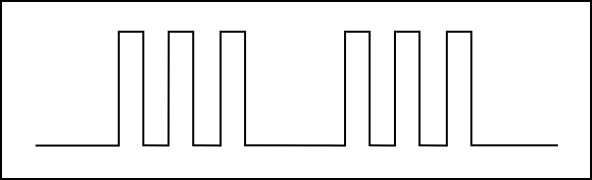

- Motor neutral (1,5ms):
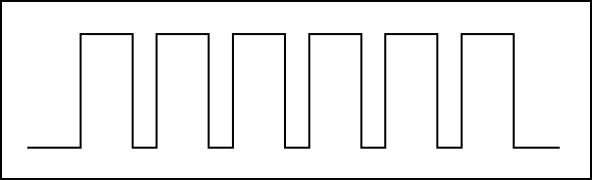

- Motor en sentido antihorario (ejemplo 1,8ms):

El precio de mercado de un servomotor es aproximadamente 18 U$S.
DINAMIXEL AX12:
El Dinamyxel AX-12+ es un un servo digital “inteligente”, fabricado por la empresa coreana Robotis e incluido en sus kits robóticos Bioloid es lo que podría llamarse un “superservo”.
Algunas de sus características:
- Usa un microcontrolador integrado
- Soporta rotación continua y modo servo standard
- Velocidad y torque ajustables
- Velocidad máxima: 300 grados/seg. Torque máximo: 16Kg/cm
- Comunicación serial a 1Mb/s, half duplex. Se pueden conectar varios motores en cadena a un mismo bus.
- Feedback de todo tipo de información: posición angular, temperatura, voltaje, fuerza, velocidad, sobrecarga, errores, etc. a través del bus serial, y posee además un led de notificación.
El precio de mercado de un motor AX12 es aproximadamente 50 U$S.
* Dada la diferencia de precios entre los tipos de motor, se decidió utilizar Servomotores para la realización del proyecto.
Diseño de la mecánica
Grados de libertad
Se manejó la posibilidad de construir un brazo robótico con 3 grados de libertad, uno por cada eje axial, lo cual implica 3 motores servos, más uno extra para el efector (Mano, o pinza), o sea, 4 servomotores.
Dado que el robot butiá puede desplazarse en dos dimensiones, y la idea es que el brazo se use conjuntamente con este, se decidió que sería suficiente si el brazo trabajara en una sola dimensión, lo cual puede realizarse con 2 servomotores, minimizando de esta forma el costo en este sentido.
Se decide, por lo tanto, que el brazo tendrá forma de grúa, es decir será un brazo robótico cartesiano con un grado de libertad.
Efector
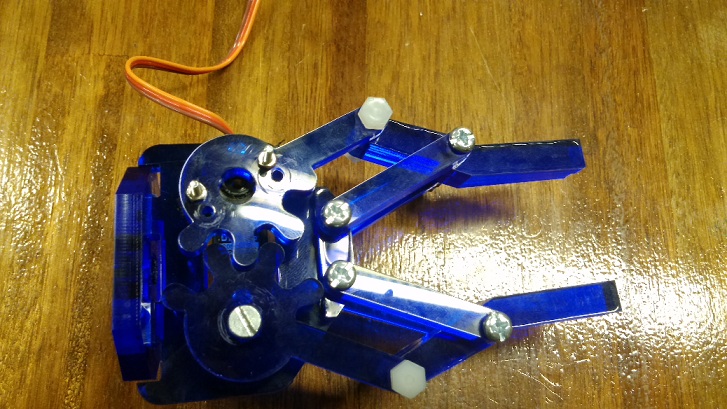
Como efector se utilizará un a pinza de diseño gratuito, descargada de el sitio thingiverse.com. Ésta será cortada en acrilico, adaptada a un tamaño compatible con los tornillos y tuercas utilizados en la plataforma Butiá.
Para el manejo de la pinza se utilizará un “miniservo”. Modelo utilizado: http://www.thingiverse.com/thing:2415

Estructura
La grúa consistirá en 2 partes; Una torre (o mástil) donde se encontrará un motor para enrollar/desenrollar la cuerda de la que colgará la pinza. Y un brazo (a modo de pluma) unido a éste, en cuyo extremo irá añadida una roldana, que girará libremente, sobre la cual pasará la cuerda que sostendrá a la pinza.


Materiales
Como en el laboratorio de robótica hay muchas “sobras” y recortes de acrilico de viejos robots Butiá, éstos se utilizarán para la construcción de la torre y el brazo. La pinza se cortará en acrílico de 6mm. Además se utilizaran tornillos, tuercas y fichas de ensamblaje pertenecientes al kit butiá.
Esta decisión tiene como ventaja que la grúa quedará mejor integrada a la plataforma butiá, además de que las piezas utilizadas son casi enteramente del kit butiá (el brazo utiliza dos barandas ligeramente modificadas para la tarea), por lo que no será necesario fabricar piezas personalizadas, a excepción de la pinza.